FuRIOSSA: Fusion of Real-Time Deep Visual-Inertial Odometry for Vehicle Side-Slip Angle Estimation
Abstract
We present FuRIOSSA, a novel framework for real-time vehicle side-slip angle (SSA) estimation that fuses geometric visual–inertial odometry (VIO) with deep spatio-temporal neural refinement. Accurate SSA estimation is critical for advanced driver assistance systems (ADAS) and autonomous driving, but most prior approaches rely on expensive GNSS/INS systems or specially designed downward-facing cameras, which are impractical for mass-production vehicles. To overcome these limitations, we propose a lightweight and deployable solution that requires only a single monocular camera and a low-cost IMU, eliminating the need for high-end sensors or specialized setups. Unlike purely data-driven methods that demand large and diverse training datasets, our approach leverages geometric VIO outputs — longitudinal/lateral velocities and yaw states — as physics-consistent priors, which are further refined through a deep neural module combining CNN, GRU, and attention mechanisms. This hybrid design enhances accuracy and robustness by capturing spatio-temporal driving cues while dynamically weighting VIO uncertainties. We evaluate FuRIOSSA on public real-world vehicle datasets, including KITTI and KAIST Urban, demonstrating that it achieves high accuracy and stability comparable to high-end systems while maintaining real-time performance and low cost.
FuRIOSSA Overview
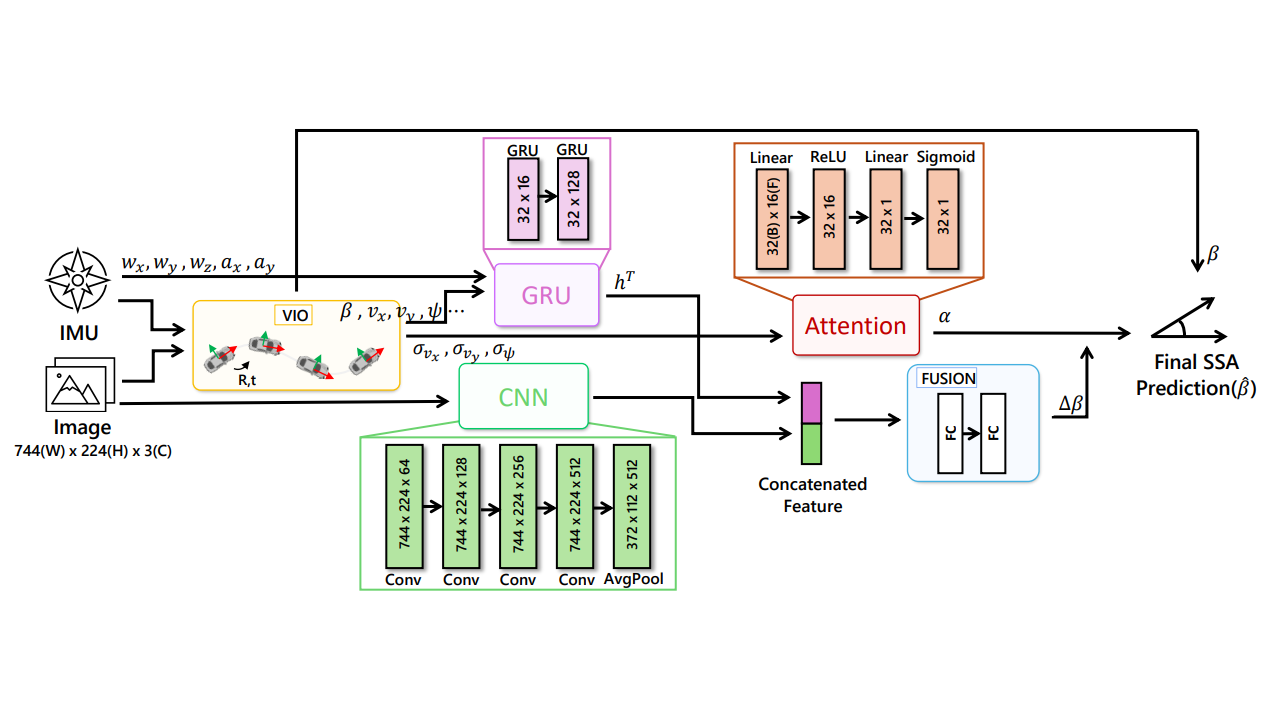
A monocular camera and low-cost IMU provide raw measurements, which are synchronized and processed through a VIO module consisting of IMU prediction, visual feature detection, and state estimation. We first obtain raw SSA from the estimated vehicle velocities and yaw states in the VIO step. This initial estimate is passed into a neural fusion and refinement module composed of GRU, CNN, and attention. This deep spatio-temporal refinement step yields an accurate and real-time vehicle SSA suitable for onboard deployment.
Result
This visualization is an integrated video for dynamic analysis of side-slip angle, testing the PVIO baseline FuRIOSSA on the KITTI dataset.
Code and Datasets
Our code, and dataset will be released upon acceptance of our work.